
We present SILVR, a dataset of light field images for six-degrees-of-freedom navigation in large fully-immersive volumes. The SILVR dataset is short for Synthetic Immersive Large-Volume Ray dataset.
Properties
Our dataset exhibits the following properties:
- synthetic: Rendered using Blender 3.0 with Cycles, the images are perfect and do not need any calibration. Camera positions and lens configurations are known exactly and provided in the corresponding JSON files.
- large interpolation volume: The camera configurations span a relatively large volume (a couple of meters in diameter).
- large field of view: In order to maximize the interpolation volume (a.k.a: the walkable volume of light), the images are rendered using fisheye lenses with a field of view of 180 degrees.
- immersive: Thanks to the large field of view and positioning of the viewpoints, every point within the interpolation volume has a full panoramic field of view of light information available.
- realism: The selected scenes have reasonable realism.
- depth maps: As the images are computer-generated renders, we provide depth maps for every image.
- specularities and reflections: The scenes exhibit some specularities or reflections, including mirrors. Reflections and mirrors always have the depth of the surface, and not the apparent depth of the reflections.
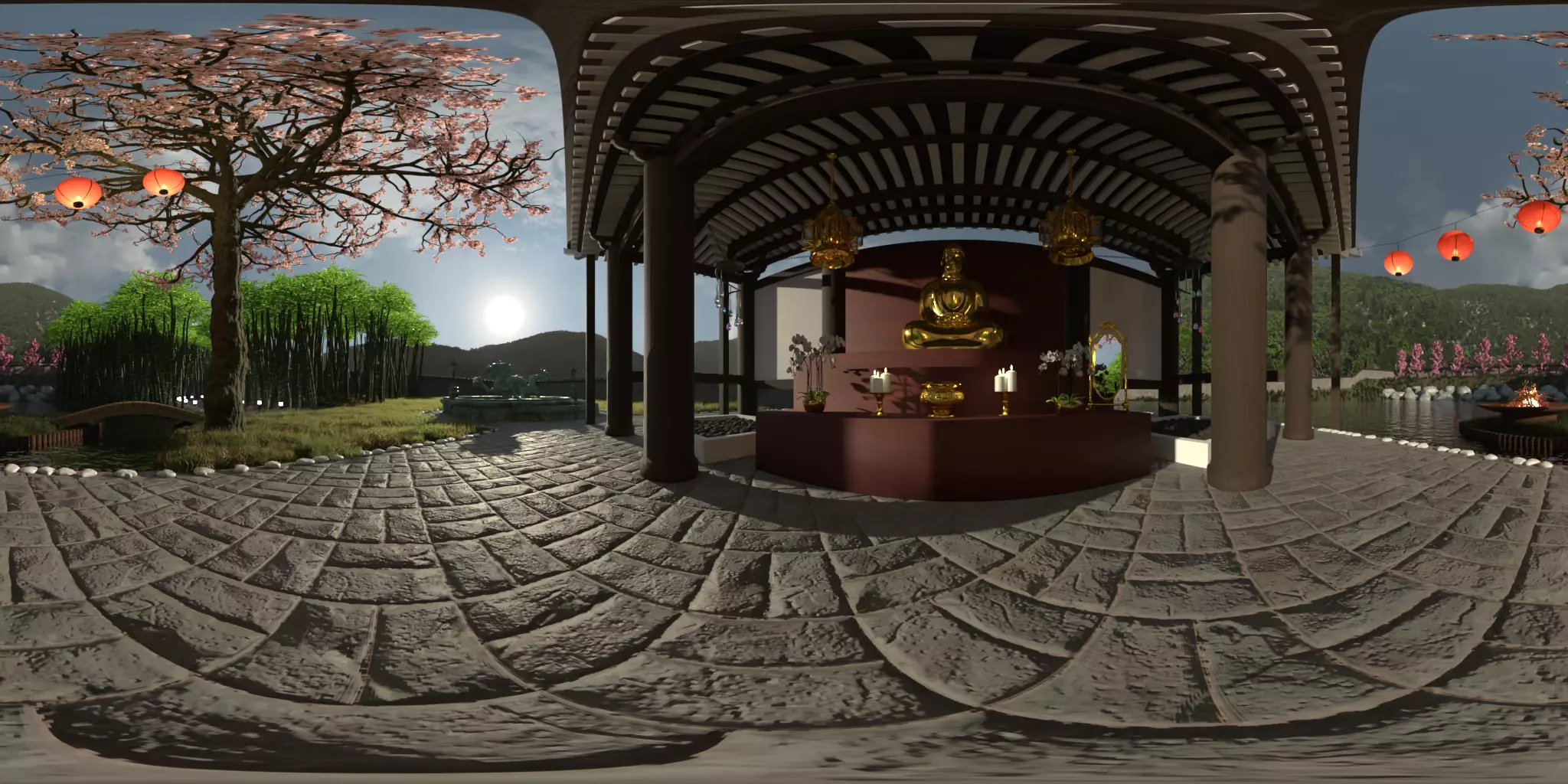
- volumetrics: Some volumetrics are also present (fire, smoke, fog) in the
gardenscene. - densly rendered: The camera setup is rather dense (around 10cm spacing between cameras).
Scenes
We present light field renders with various camera setup configurations for three scenes: Agent 327: Barbershop, Zen Garden, and Lone Monk.
Tools
Lens Reproject
As the images are rendered using equisolid fish-eye lenses, we also supply a tool (written in C++) to generate reprojected images with other lens types, as most established light field research assumes rectilinear lenses.
Project page: github.com/IDLabMEDIA/image-lens-reproject
NeRF configuration generator
We provide a Python script
generate_NERF_transforms.py
that produces the required NeRF configuration to test our scenes in NeRF using
instant-ngp.
Script source: github.com/IDLabMEDIA/large-lightfield-dataset/generate_NERF_transforms.py
Blender Lightfield Addon
The Blender addon we developed in-house to produce the dataset images is also open-sourced to enable anyone to start producing light field datasets from virtual scenes in Blender.
Project page: github.com/IDLabMEDIA/blender-lightfield-addon



Credits
The website containing the paper and code can be found here.





{kind=link}